이번에 자율주행 관련 대회를 나가면서 인지판단을 개발하게 되었다. 특이점은 신호등이나 표지판이 미션에 없어서 차선 검출만 해주면 되는 상황이었다.
기본적으로 실제 도로에서 대회가 열리는 것이 아닌, 공터 같은 곳에서 1차선으로 경기장이 구성될 예정이었다. 그래서 따로 딥러닝을 사용하진 않았고, openCV를 이용하여 차선 검출을 진행했다.
기본적으로는 오픈 소스를 가져와서 환경에 맞게 최적화를 진행해주었다. 그런데 오픈소스 쓰면서 느낀 거지만 남이 짠 코드를 내것으로 만드는게 역시 쉽지가 않았다.,, ㅎㅎ 너무 당연한 말이지 응응

아 그리고 딥러닝과 openCV를 같은 테스트 영상에서 비교했을 때도 우리같이 실제 자동차 크기가 아니고 단순한 경우 후자가 좀 더 의도에 맞게 굴러갔다.
또 딥러닝한거 돌리려면 nvidia 기반 gpu 셋팅을 다시 해줘야하니까,, 으악 거렸는데 openCV로 커버가 돼서 너무 좋았다.
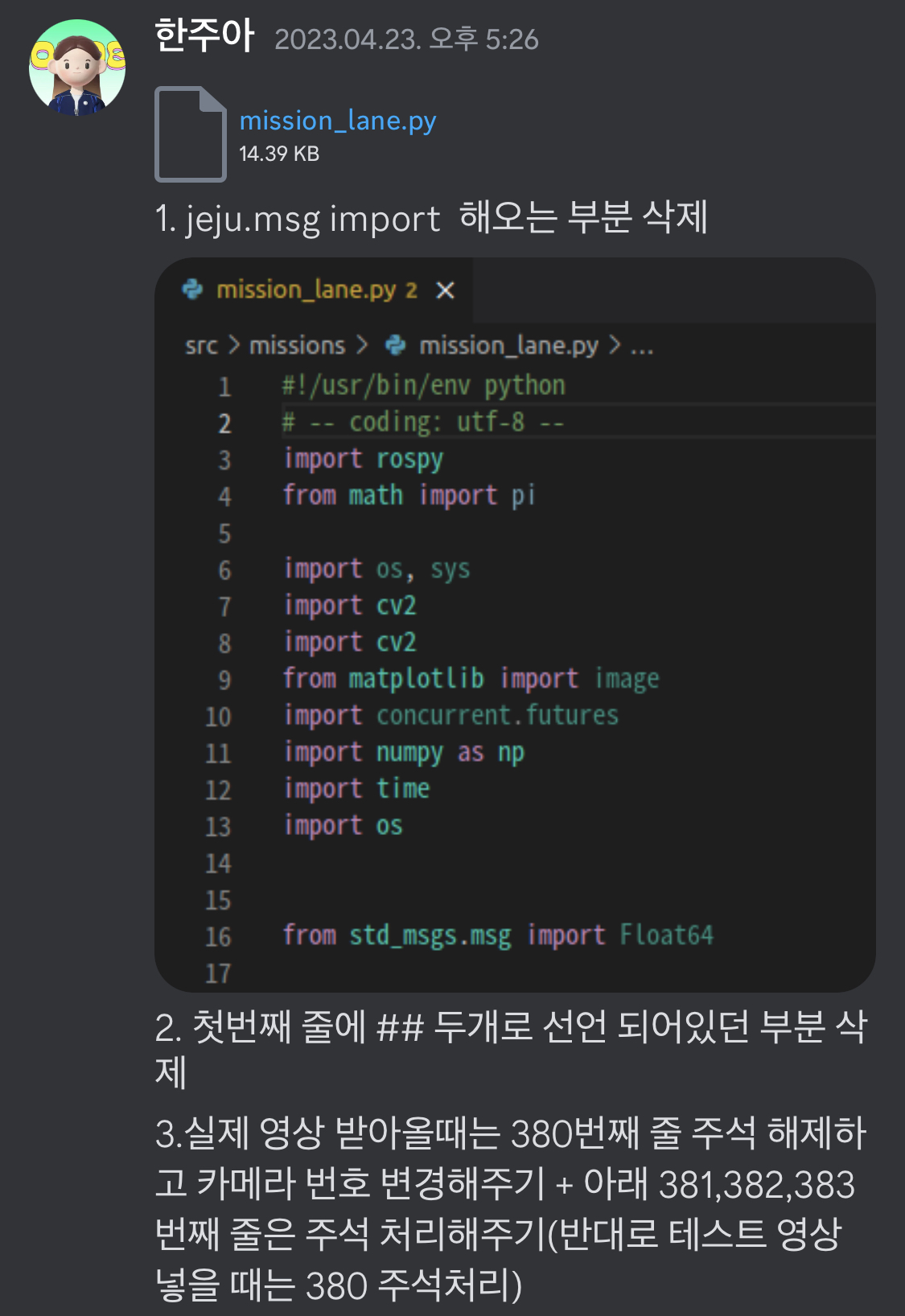
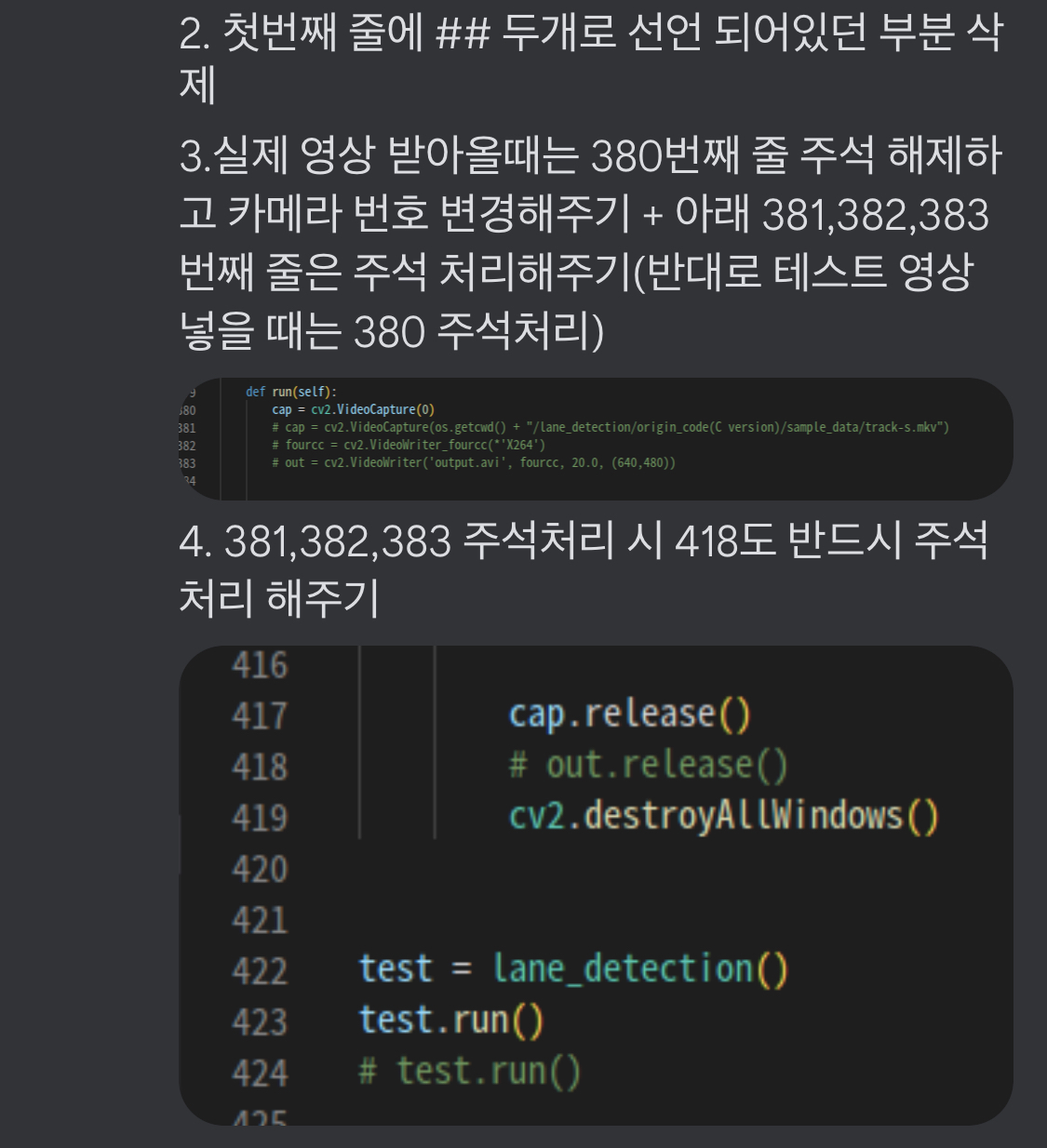
팀원들과 워크스페이스 개념으로 discord를 사용하고 있는데,
정말 많은 도움이 되었다.
최적화를 하고 테스트를 할 때마다 일지처럼 간단하게 남겨두니
나중에 헷갈릴 일도 없었고 글로 적으니 기억도 더 잘났다.
---------------------------------
아쉬웠던 점
- 우선 제주도에서 대회가 열리다보니 , 사전주행을 할 기회가 없었고 실제 도로가 아니다 보니 데이터셋을 확보할 수 없었고 따라서 딥러닝을 사용할 수 없었다.
- 그래서 차선 인식이라기 보다 단순 문제해결을 위한 알고리즘 공부를 한 느낌이었다.
- openCV만 사용하다보니 정말 딱 이번 대회에서만 최적화된 느낌이 있었다.
- 다른 환경에서는 사용하지 못하는 코드라서 아쉬웠다.
- 학교에서 임시로 제작한 트랙에서는 잘 작동했지만, 우려했던 대로 실제 대회장에서는 최상의 퍼포먼스를 보여주지 못했다.
- 그래서 잠을 안 자고 밤새 어떻게 해결할지 생각해보았다.
- 슬라이딩 윈도우를 사용하는 알고리즘 하나와 , 가우시안 필터를 응용하여 인자 3가지만 바꾼 원래 코드를 준비했다.
- 후자가 너무 좋은 퍼포먼스를 보여줬다.
- 1일차에 테스트하자마자 해당 아이디어를 생각해내지 못한게 너무 아쉽고 속상했다.
- 돌발 상황에 대해 침착하게 아이디어를 빠르게 생각해내는 연습을 앞으로 많이 해야겠다고 생각했다.
--------------------------------
발전할 점
- 위에 말한대로, 돌발 상황에 대해 침착하고 빠르게 아이디어를 제시하는 연습을 많이 할 것이다.
- 매일매일 남기는 개발일지가 정말 많은 도움이 되었다. 앞으로도 개발일지를 쓰는 습관을 기를 것이다.
- 학교 수업이 중요하다..! 특히 수학..! 코드에 많이 사용되고 있는 것을 느꼈다. 기초 학력의 중요성을 느꼈다.
- 어떤일이 있어도 끝까지 포기하지 않는 것이 중요하다고 느꼈다. 포기하지 않았음에 후회가 아닌 아쉬움으로 남았고 어떻게 해야 내가 더 발전할지를 생각해 볼 수 있는 것 같다. 앞으로도 원하는 상황이 아니더라도 포기하지 않는 마인드셋을 가질 것이다.
- 백준과 같은 코딩테스트를 풀어보는게 효율적인 알고리즘에 도움이 될 것 같다는 생각이 들었다. 많은 문제들을 효율적인 알고리즘으로 해결하는 연습을 많이 할 것이다.